Amazing audience last week at our pod reveal. After 10 months of design work, manufacturing and testing I am proud to show you our result. Here is our entire presentation:
Stay posted and follow us on social media to find out what challenges we face up during the SpaceX competition of July 22nd. Part of our team already leaves tomorrow to Los Angeles.
Last night was incredible! 700 people coming at Delft’s theater to watch our design reveal. I very pleased with the reactions I got from the public and I am very encouraged to get back on that stage. Who knows, maybe for a pod reveal? Stay tuned and you’ll find out our top speed soon!
Here is our five months of work represented in one hour. First, you see Edouard presenting our long term vision, next is Maurits with the process we are following and finally you see me explaining the technical part and the pod that will race at the SpaceX competition on July 22nd. Enjoy!
I graduated! After 3 years I am proud to say that I did my Bachelors of Honours at the Aerospace Engineering faculty of TU Delft.
Today my team and I have finished our final year project. After ten weeks of work we managed to present our design to a large crowd at the yearly DSE symposium. Our team was composed of 9 students and out of 26 teams we were ranked as having the 2nd best design by a jury of several European CEOs and professors form different universities. But what did we do?
Under the supervision of Christophe De Wagter we designed a pollinator drone. Why? Because of the need of artificial pollination. Bees are dying and a backup system needs to be set in place from an early stage. One third of your food relies on being pollinated by bees and if no solution mitigates the risk of hunger, people might die in less than 4 years.
We targeted the most profitable crop in the Netherlands, namely the tomato plant. This plant relies on self pollination, meaning that the pollen from the male part is in the same flower as the female part. This process makes the tomato flowers relatively easy to pollinate compared with the vanilla or the cucumber crop where cross pollination processes involve transporting the pollen from a male flower to a different female flower.
APIS – Autonomous Pollination & Imaging System
We started of with three concepts: a flapping wing, a small quad rotor and a big one. Trade-offs were evaluated in order to determine the best concept, and because of the high payload needed to be carried on board, the big quad rotor concept was chosen. Its name is APIS and it fits in a 30 by 30 cm box, with a weight lower than 250 g. It can fly autonomously for 10 to 12 minutes using the UWB (Ultra-Wide-Band) for indoor navigation, or the stereo vision for obstacle avoidance. The full system consists of 64 APIS and 8 ground stations and it is able to pollinate a 4 hectare tomato greenhouse every 3 days.
How can APIS pollinate like a bee? Well, it’s just inspired by bees. Studying them closely, we found out that the 100 Hz flapping frequency of a bee is enough to shake the flower and move the pollen to the right place. Therefore, we designed a blower that will target the flowers one by one with a 10 m/s air jet. This jet can induce vortex shedding to the stem of the flower and thus, vibrate it with the right frequency.
If you would like to dive more into the technical part of the detailed design and answer questions like how does the propeller wake interfere with the blower or what kind of electronics and algorithms can be used for the sensors and for navigating inside a crowded place like a greenhouse, then you can read the attached 150 page report made by our team: Greenhouse Pollinator Drone Final Report. Make sure you also check the design video below.
This week-end I took part in the Raspberry Pi Hackathon. Except the fact that I needed 15 hours of sleep in order to recover from the time spent building the project, it was a wonderful experience both for beginners and the advanced ones in this field. I, my dad and two students from Electrical and Electronic Engineering department from Polytechnic University of Bucharest made an effective team and took part in the hardware section.
Purpose of the project: remote monitoring of a room or area where access is difficult or dangerous
Examples of use :
1) residential
monitoring parameters of comfort or safety through a web interface (it can be accessed also on the smart phone);
regular use of sensors (temperature, humidity, pressure, wind, proximity, etc.);
comfort control parameters by pressing a button ( floor heating, water pumps, sockets/lights, etc.);
using a webcam with motion detection which sends pictures on a predefined email address.
2) professional use
centralizing the aggregation parameters from distributed sensors (eg scattered mini weather stations)
collecting data from mobile stations (video/audio, collections of various sensors) using a platform with wheels (line follower) controlled by Arduino which communicate with raspberry pi pyfirmata
streaming video/audio
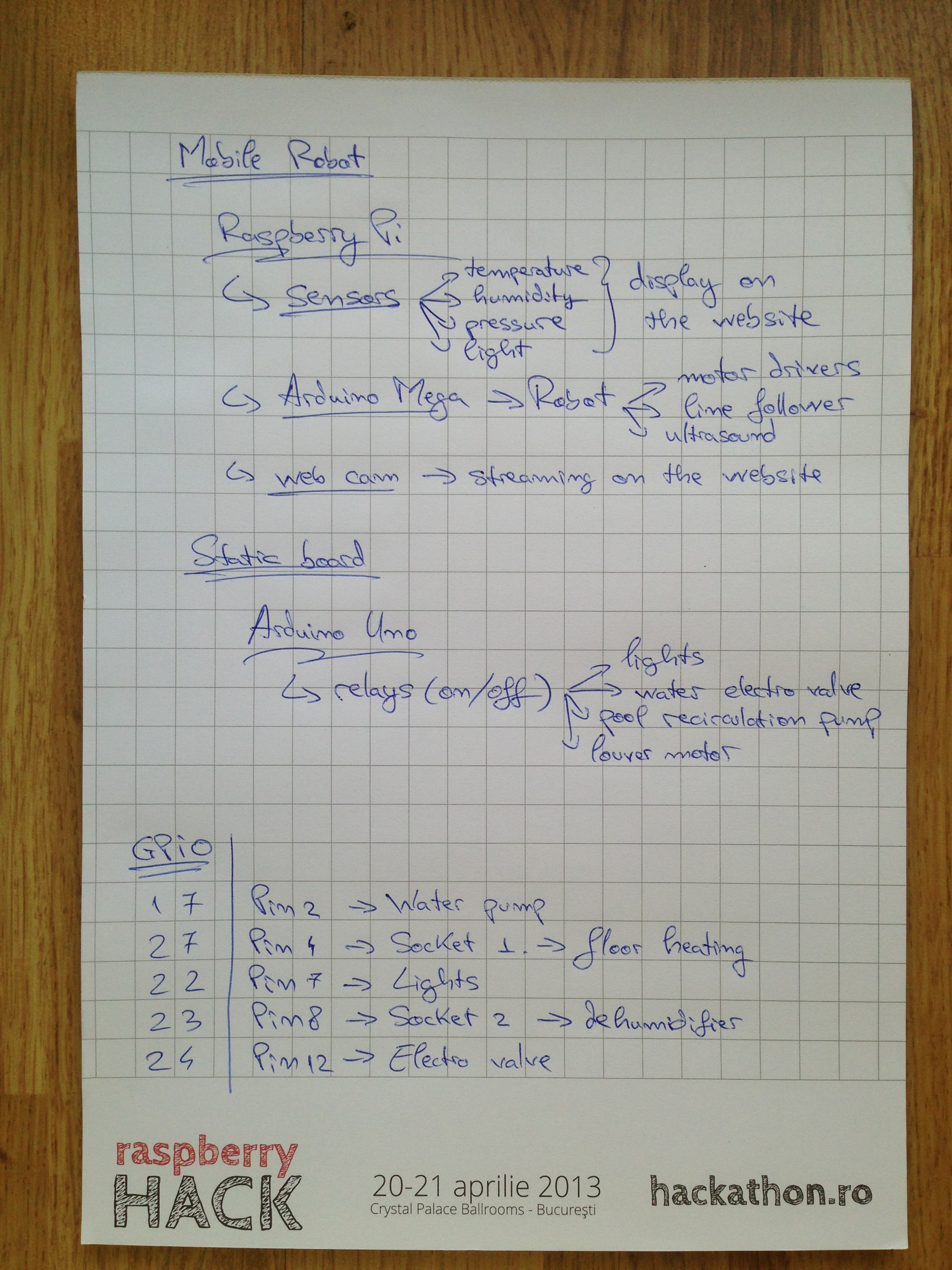
Project components:
Raspberry Pi sensor I2C or SPI
Usb webcam
Usb wi-fi (for communication with the mobile platform)
Arduino Mega controller for 4 motors drivers and additional analog and digital sensors (IR, ultrasound)
Arduino Uno controller for relays which control the sockets and lights