Everything started from the desire of exploring new territories and collecting data. I chose a RC car as a platform whereon I have attached an Arduino Uno board, temperature, humidity and pressure sensors and a pan & tilt system (2 servos). This system has a web cam holder in order to collect videos and images through a smart phone using Skype. The pan & tilt system is controlled by a Wii nunchuck in real-time. More information about this topic in this tutorial.

The communication between Spy Robot and me is achieved by means of two Arduino boards (one placed on the platform and the other one connected to my PC) which see each other via bluetooth. The video is transferred separately using Skype. Thus, I can see what Spy Robot sees, by controlling its eyes (the camera -smart phone-) with the Wii nunchuck. Meanwhile, I can analyse the information collected from sensors (also in real-time) on the terminal.

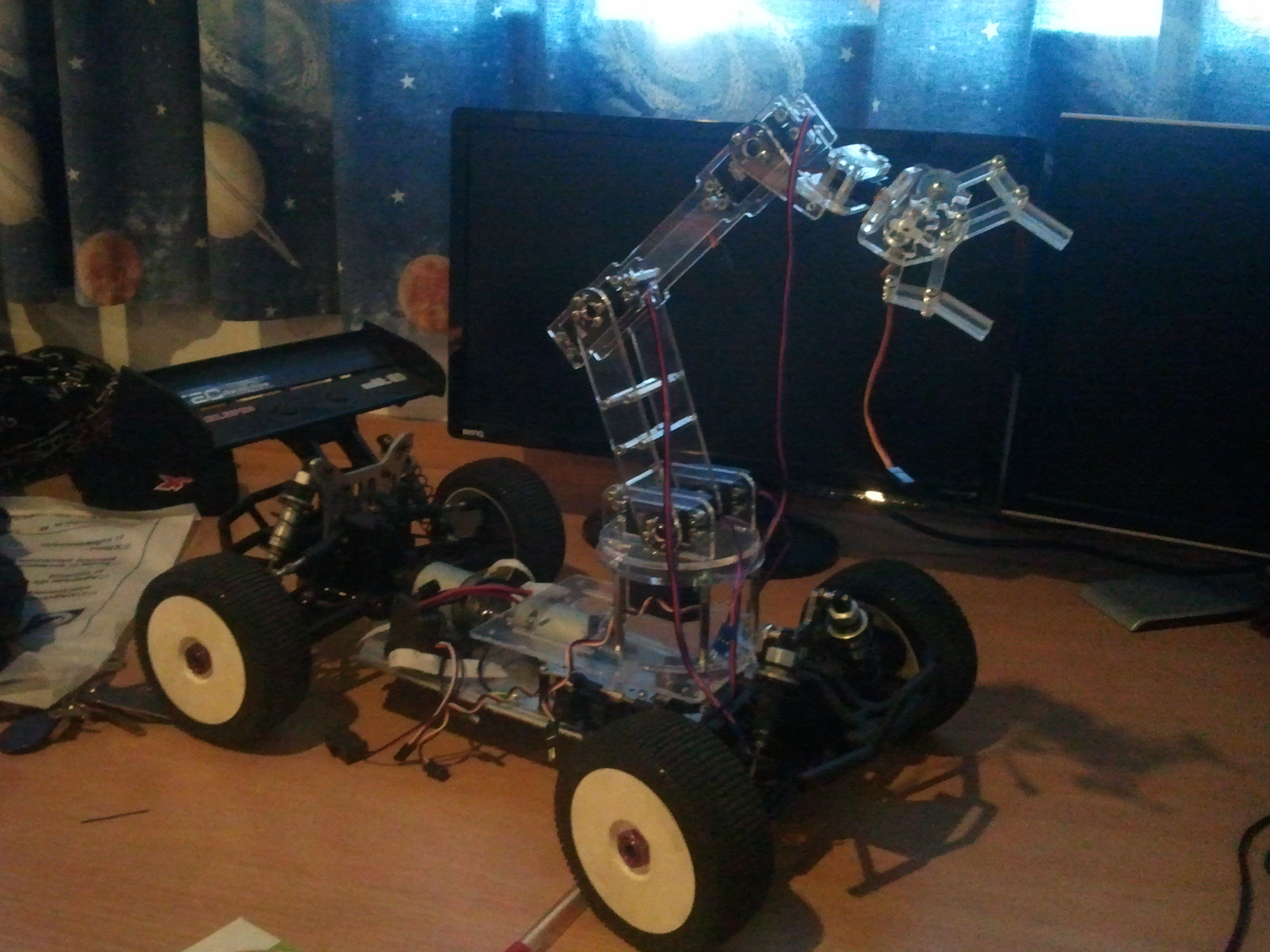
Yesterday I won the first prize in the regional stage of robotics contest for my robot and I qualified for “Infoeducatie” National Contest, robotics section that would take place in two months. To this respect, I intend to add an arm to my robot, in order to be able to grasp objects that Spy Robot sees during its explorations.