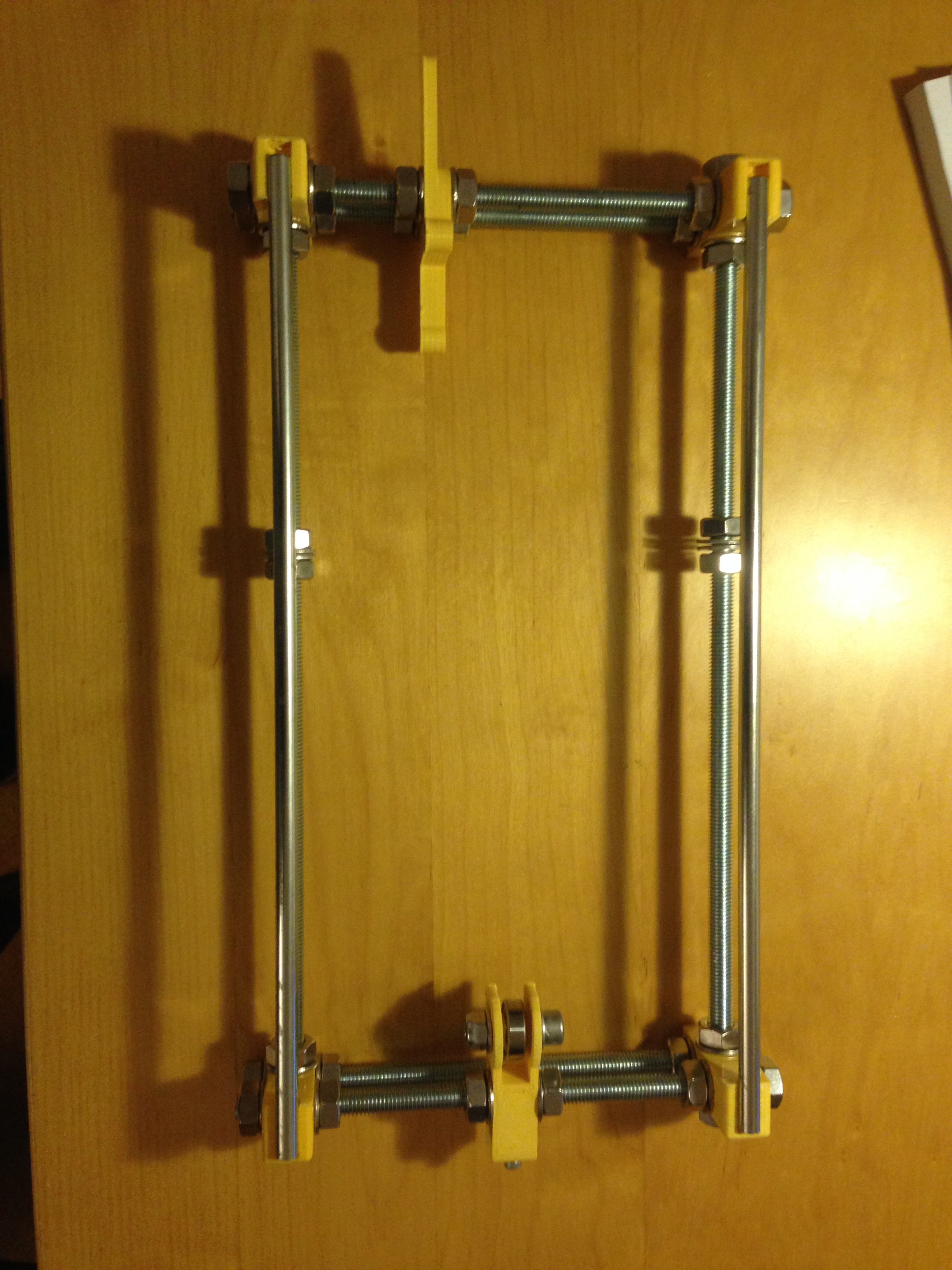
The frame was cut according to the dimensions from the dxf file and is now ready to support my printer. The order from E3D also arrived with the rest of the parts from the BOM. The only difference from the list is the hot end, because I didn’t want to go for a J-head, but instead I chose the 3mm E3D-V6 since I have heard good things about it.

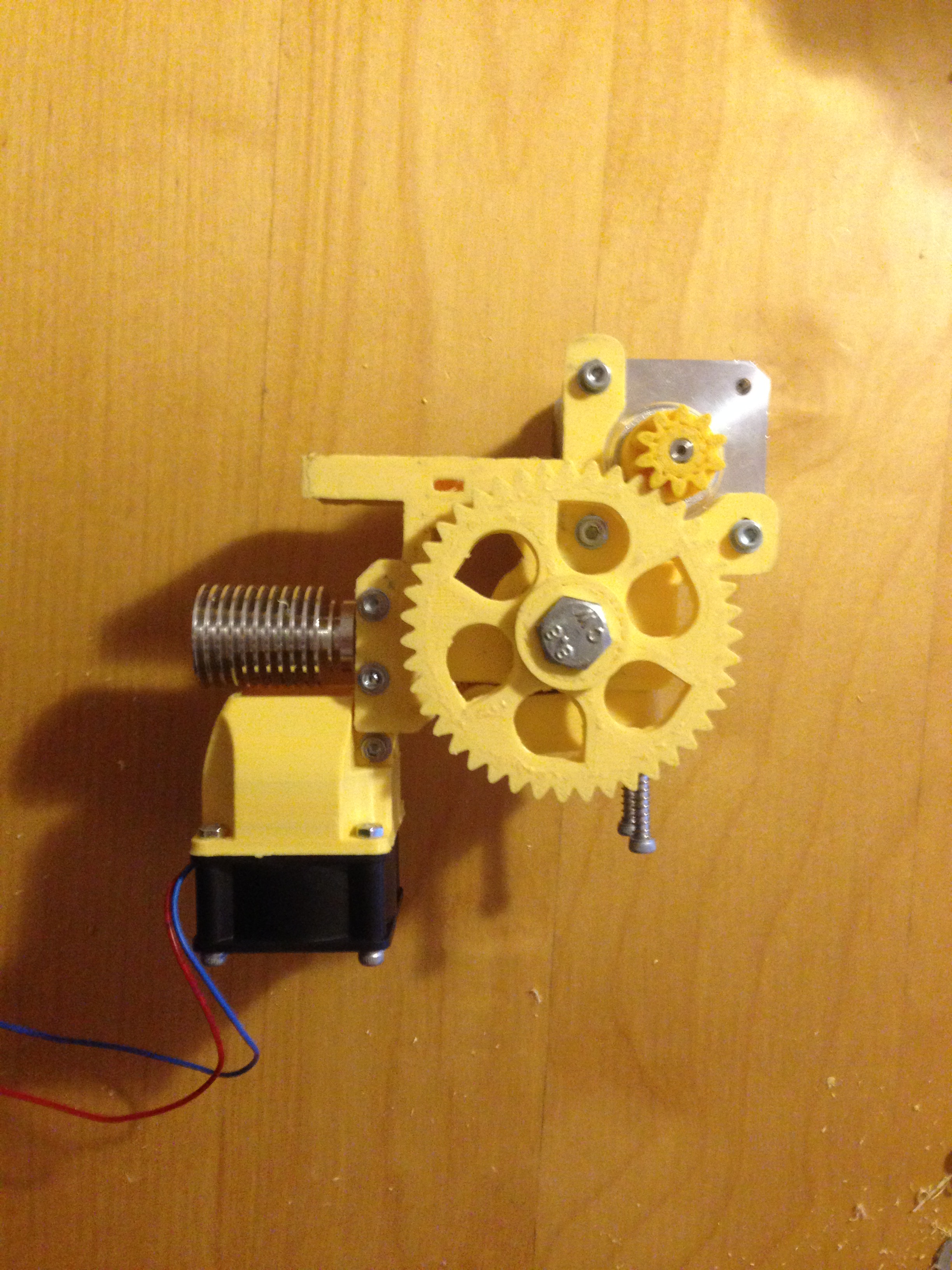
Since I had the plastic gears already included in the printed parts, I chose a direct set-up, meaning that the extruder will stay on top of the hot end, feeding the filament inside. This is not necessary the best solution in my opinion because the printing will have to go slower because of the extra weight added on the x and y-axis.
In the present, the printer started to get a shape and it looks like this:


An extra feature added to this frame is the MF105ZZ, which is a 5mm bearing that will prevent the wobbling of the M5 rod on the z-axis. I find this really important because it makes sense to constrain a spinning rod on both ends and not in only one like the original Prusa.