Last Christmas, I received a special gift from my parents. It was a sensor called Xtion from Asus, specially designed for developers. It’s actually a web cam and at the same time a IR cam (for depth) which simulates a 3D vision. It is very similar to Kinect sensor, but the Asus’s version is more flexible from the OS point of view. I am interested in working in Linux (Ubuntu), so this would be the perfect sensor for me.
As I am a beginner at this subject, I have started with different tutorials about Computer Vision and Body Tracking (OpenNI). After several weeks of practice, I made up my mind about how to use this sensor. I built a robotic arm which executes simultaneously, that is in real-time, the movements of my physical arm. I called it “The Xtion Arm”.
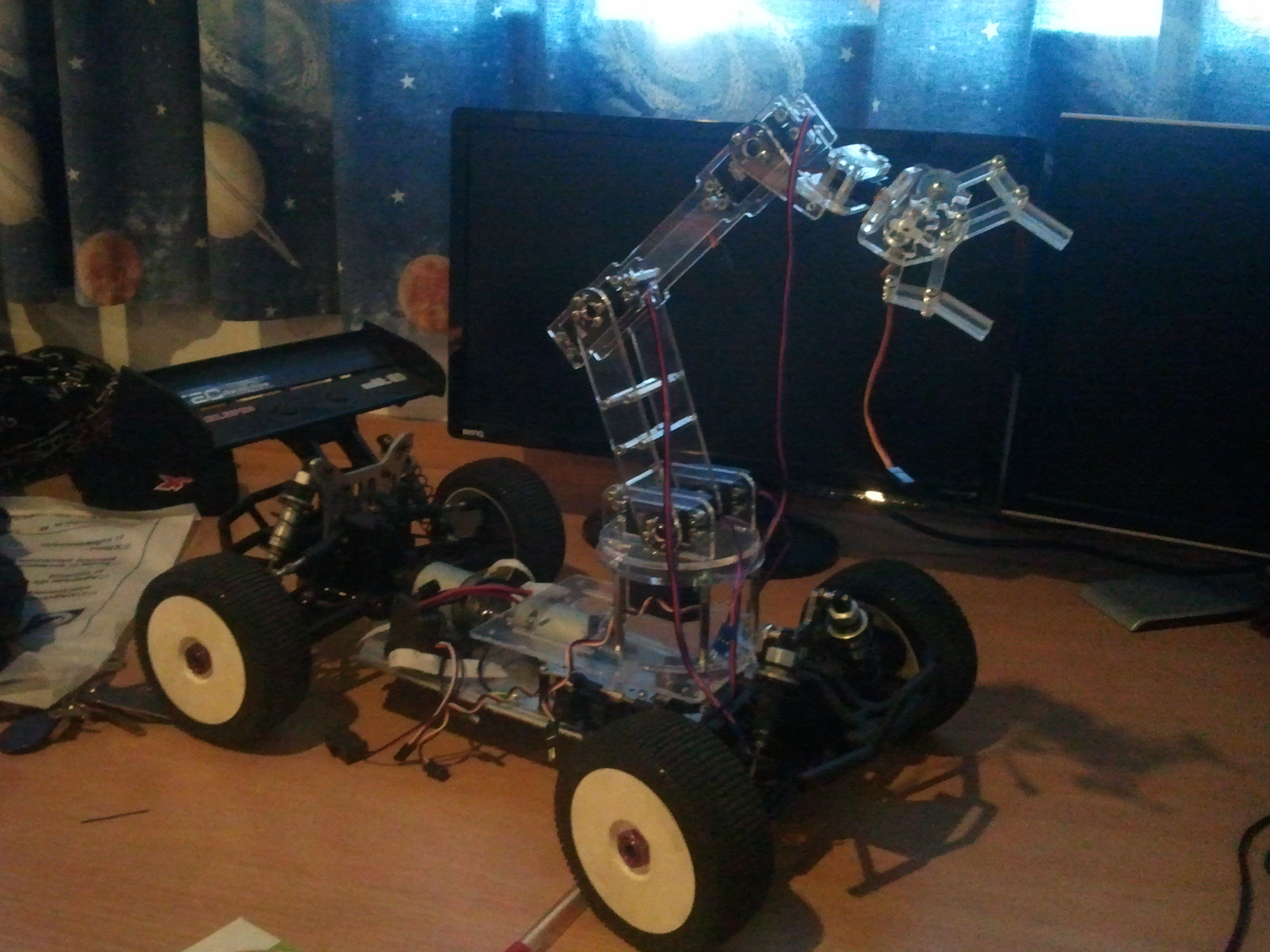
Here is my first version:
It is made by plexiglass (4 mm) and has 2 servos for the two joints (elbow and shoulder).
My movements are recorded by Asus Xtion and processed in Processing software which transfers the coordinates of the two points (joints) through a specific port to Arduino software which converts the coordinates of the 3-axis into angular dimensions. These values are sent to Arduino board which commands the servos.
In order for the software to perform this, I have written 3 applications. The first one is called “the Server”, it is developed in Processing and it gets the coordinates in “real world” dimensions. The second application is called “the Client”. The transmission of 9600 bits/s between Server and Client can be achieved either by serial (local: both arm and sensor are connected to the same computer) or via the Internet (sensor+Server on computer 1 and Xtrion Arm+Client on computer 2). The third application is Arduino, it communicates with the Client and sends values to servos. All these codes are published on my GitHub account here.