As 3D printers started to become so popular, I decided that I should have a mini-factory at home. Surfing on the internet, I have found that this model (Prusa i3 Rework) is quite appreciated for a 400€ budget. Moreover, it is an open source project which means I can contribute and develop it in the future.
The BOM can be found here.
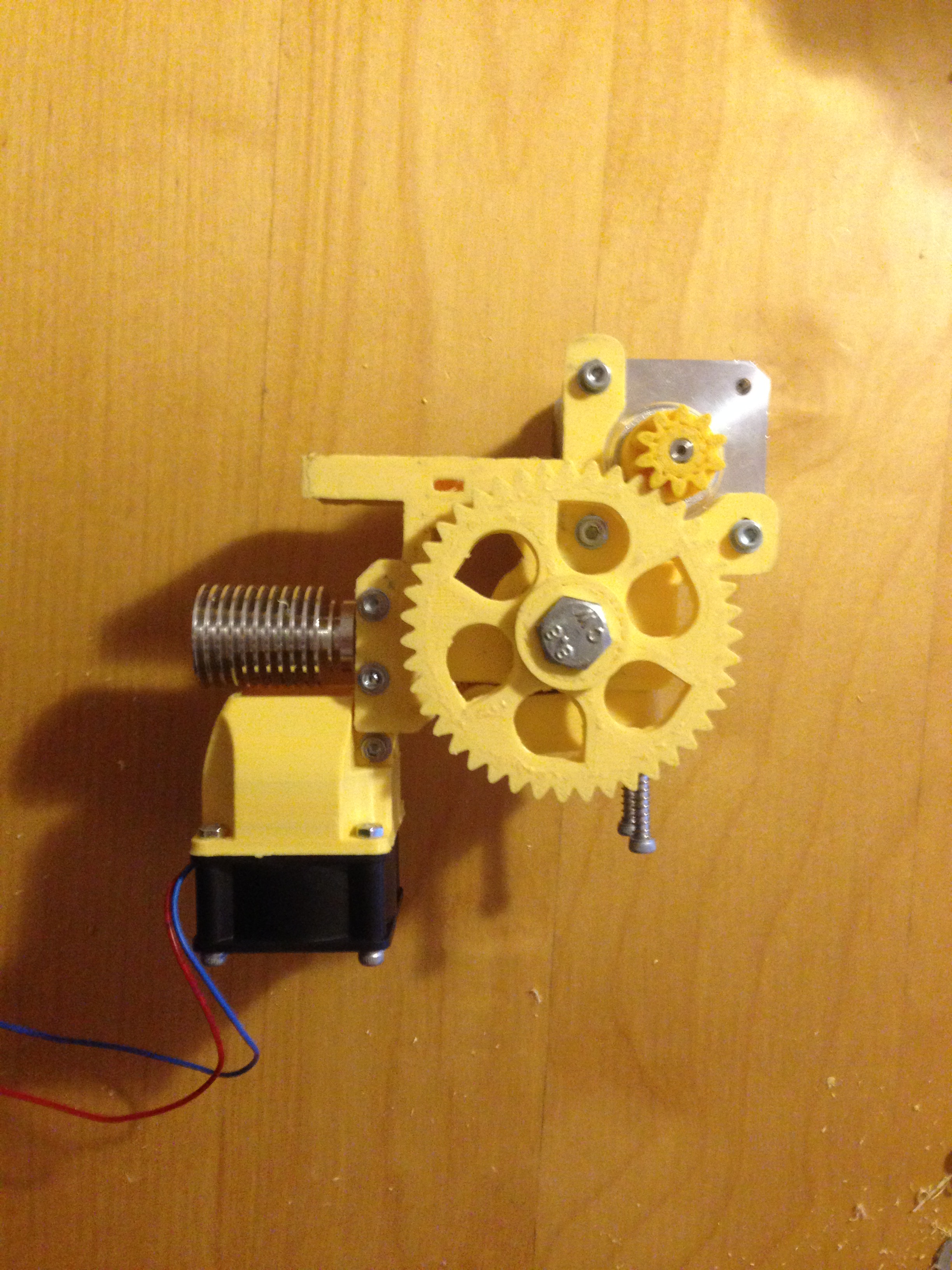
I am posting this today because I just received the printed parts from Ebay as seen below.

While these parts were shipping to my address, I already bought the rods, screws and nuts from a local hardware store. Parts like electronics, belts, gears, stepper motors or hot end can be found on web sites like this: http://www.e3d-online.com or on other web sites.
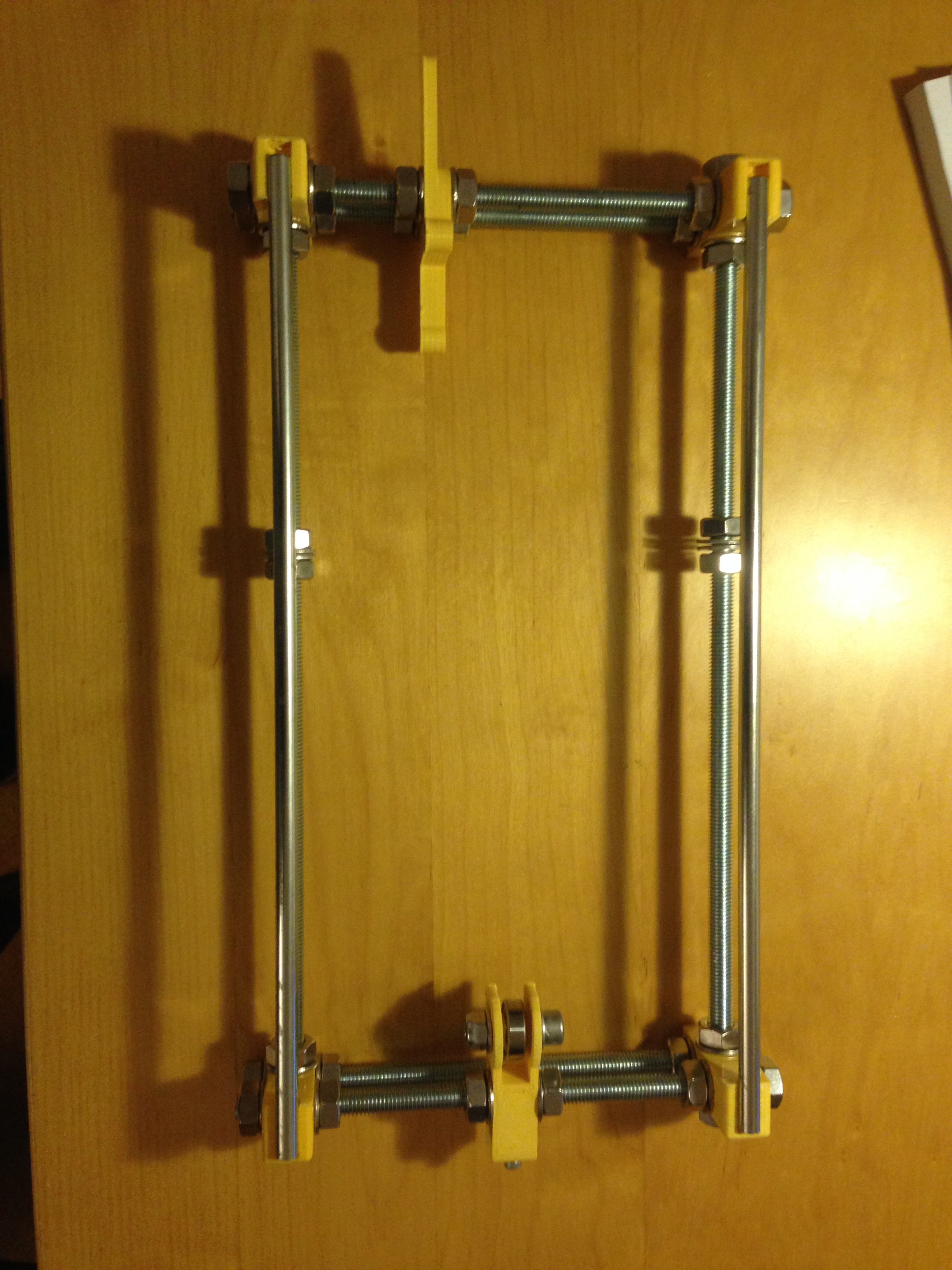
Being enthusiastic about building my own printer, I couldn’t resist to wait until tomorrow, so I already started to build the bed frame.

The next step would be to order the main frame. On reprap.org it is recommended to buy an aluminium frame which I found to be a bit too expensive. I already found a wood frame project which has extra reinforcements and is build out of 6mm MDF. I have chosen this frame because the MDF is easy to find in any hardware store and because my University provides laser cut services. In this way, I will end up spending less money which can be invested later in important quality parts, such as the hot end.